Premier contrôleur de mouvement conçu pour les micromoteurs

Les systèmes de plus en plus intégrés nécessitent des moteurs CC petits et puissants. Cependant, en tant qu'entraînement ou système de positionnement, ceux-ci ne sont vraiment pertinents que lorsqu'ils sont associés à des composants tels que des boîtes d'engrenages, des encodeurs et des contrôleurs de mouvement. Leur sélection correcte est essentielle pour la fiabilité. En raison de leur conception, les micromoteurs à courant continu, en particulier, ont des exigences spécifiques. FAULHABER propose des contrôleurs de mouvement puissants, même pour ses plus petits entraînements CC, dont la taille et la fonction correspondent parfaitement à celles du moteur.
Puissant et extrêmement compact
Avec les mini et micro moteurs CC de FAULHABER , il n'y a pas de couple résiduel - grâce à l'évent symétrique - ce qui permet un positionnement précis et un excellent contrôle de la vitesse. Les rapports charge/vitesse de rotation, courant/couple et tension/vitesse sont linéaires. En outre, la quasi-totalité du diamètre du moteur est disponible pour le bobinage, ce qui permet d'obtenir plus de puissance et de couple pour leur taille. Une faible inertie du rotor assure une constante de temps électrique particulièrement basse (fonctionnement avec une dynamique élevée et de fortes surcharges). Un couple continu triple en mode de surcharge n'est pas inhabituel et facilement réalisable pour les applications servo.
aucun risque de surchauffe
FAULHABER a développé des contrôleurs de mouvement spécialement pour ses plus petits entraînements, qui estiment la température du bobinage du type de moteur couplé sur la base de modèles de complexité variable stockés dans le contrôleur. Cela permet au concepteur d'utiliser la totalité de la plage dynamique du moteur - par exemple, dans les tâches de positionnement rapide. Cela réduit également le courant avant que la bobine ne surchauffe. Via la sélection du moteur dans le FAULHABER Motion Manager, les paramètres nécessaires sont transférés au contrôleur de manière conviviale.
"Avec les contrôleurs de mouvement FAULHABER pour les plus petits entraînements, le concepteur peut utiliser la totalité de la plage dynamique du moteur"
Des informations supplémentaires sur l'intégration thermique peuvent être ajoutées aux modèles. Quelle est l'efficacité du refroidissement du moteur ? La puissance doit-elle être réduite en raison de températures ambiantes élevées ? La configuration de la boîte d'engrenages et du codeur fonctionne-t-elle ? Grâce à ces données supplémentaires, la puissance maximale du moteur peut également être utilisée, par exemple, pour un entraînement qui fonctionne de manière cyclique dans une chambre climatique - le contrôleur suit alors les paramètres de température ambiante provenant du contrôle de la chambre et les applique dans les modèles. Cela vaut également lorsque les cycles de charge sont connus, ce qui permet dans de nombreux cas d'utiliser un moteur plus petit (applications mobiles !).

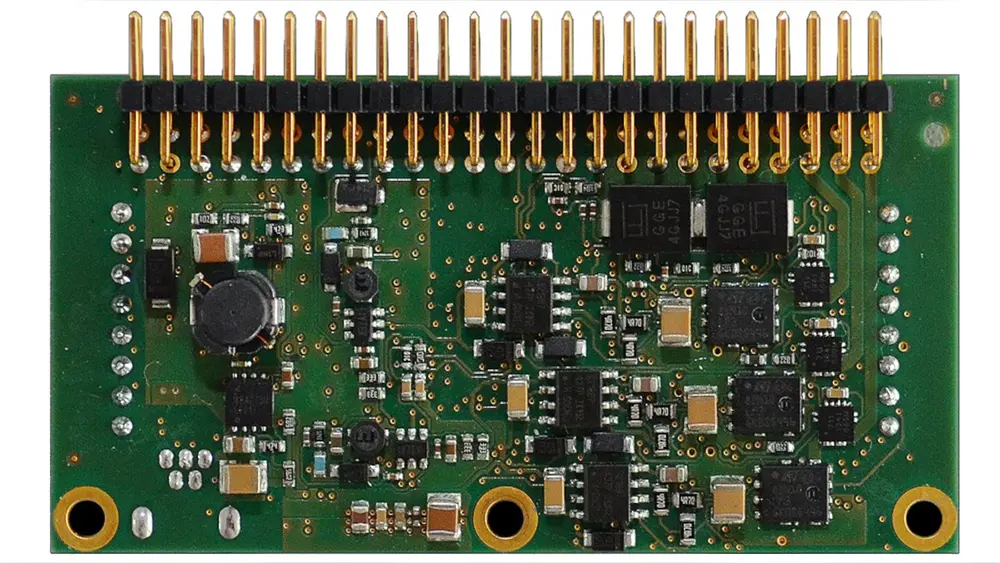
Les contrôleurs de mouvement éprouvés de la série MC V3.0 sont d'un usage limité pour les micromoteurs FAULHABER en raison de leur taille et de la résolution de la mesure du courant moteur intégrée. Le nouveau MC 3001 B/P est parfaitement adapté aux servomoteurs plus petits dans ces domaines. Avec une tension d'alimentation allant jusqu'à 30 V, le contrôleur compact (16 x 27 x 2,6 mm) atteint un courant continu de 1 A et un courant de crête de 5 A, à des tensions inférieures, un courant continu allant jusqu'à 2 A est facilement réalisable.